Equivariant Reinforcement Learning Frameworks for Quadrotor Low-Level Control
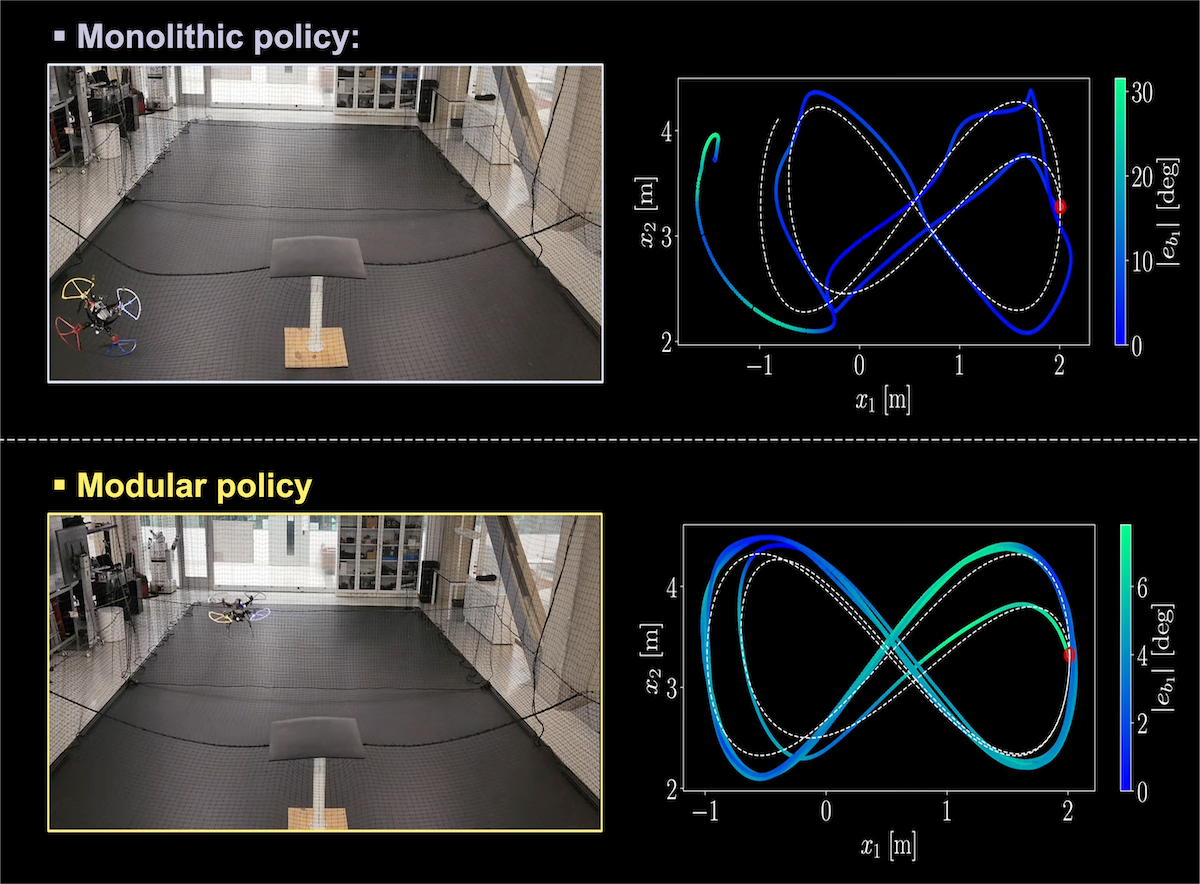
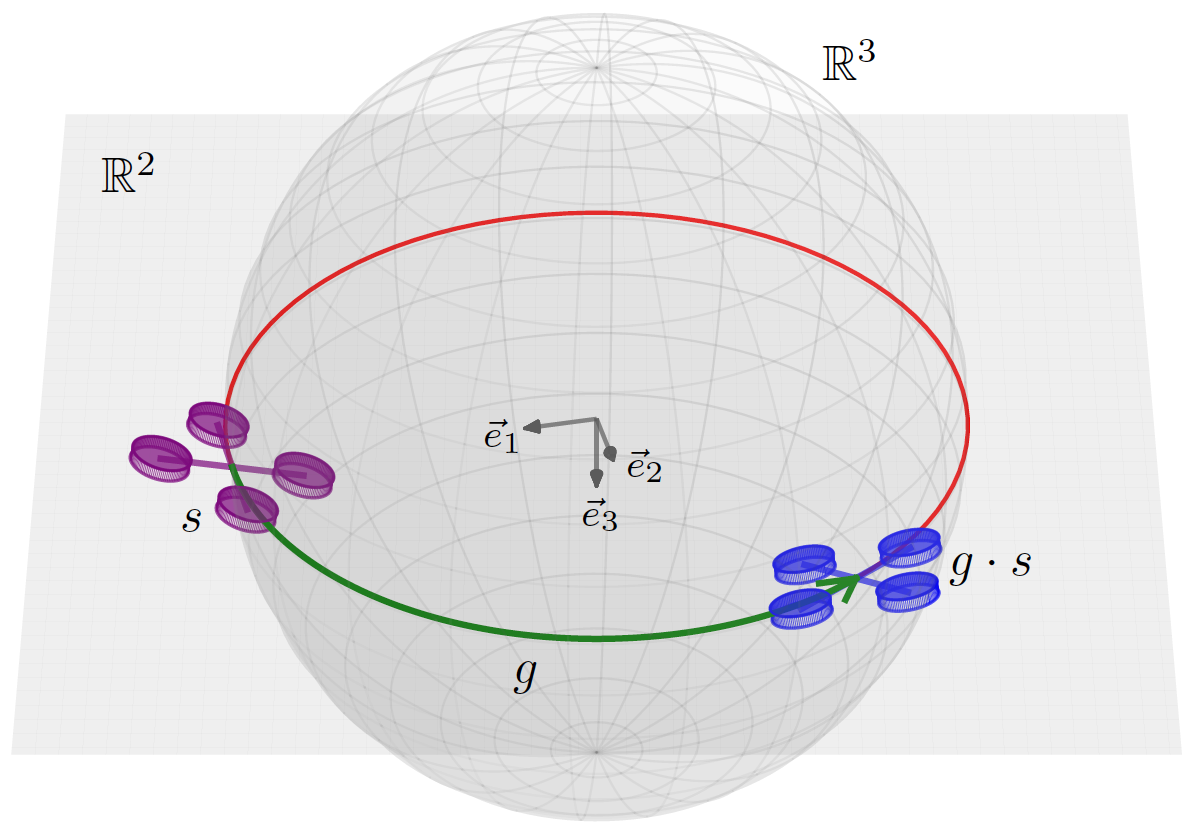
This study explores how Equivariant Reinforcement Learning uses geometric symmetry to dramatically improve the training efficiency, safety, and precision of autonomous quadrotor drones.